Guppy
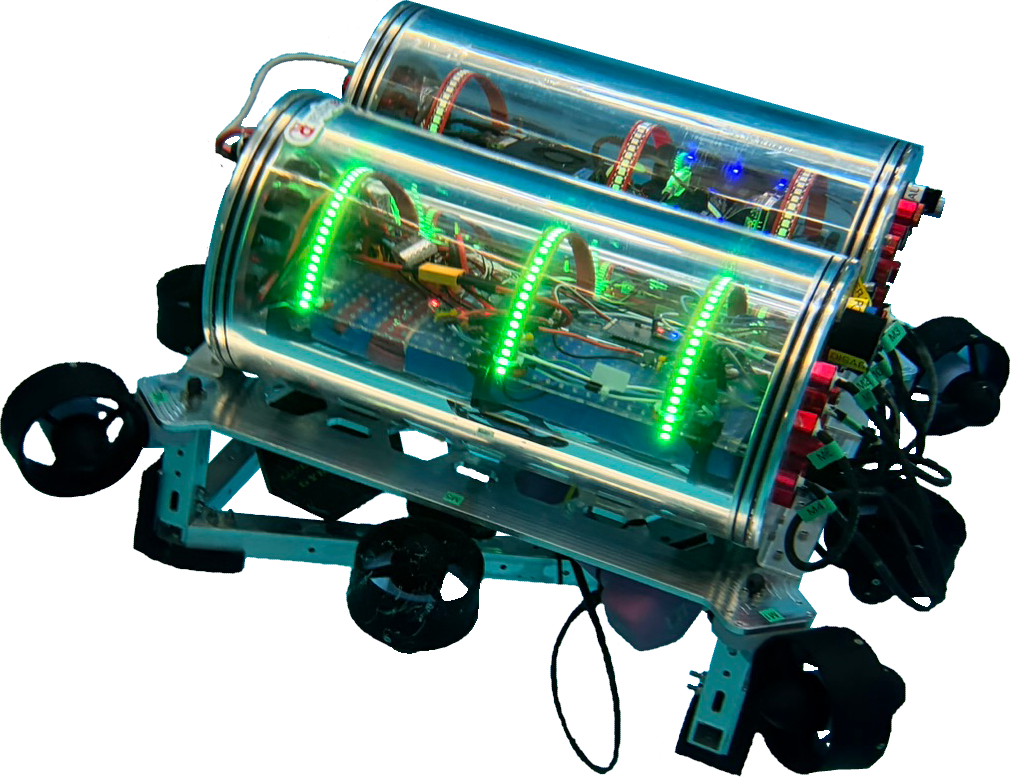
Specs
- Dimensions
- 27" Long
- 25" Wide
- 15" Tall
- Mass
- 34.2 kg (75.2 lbs)
- Chassis
- 6061 Custom-Cut Iso-Grid Baseplate
- 1" in. Square Aluminum Skids
- Hulls
- Two 16.5" long Cylindrical 1/4" Acrylic Hulls, 8" Inner Diameter
- Degrees of Freedom
- 6: X, Y, Z, Roll, Pitch, Yaw
- Compute
- LattePanda Sigma
- Intel Core i5-1340P, 12-Core, 16-Thread
- 32GB Dual-Channel LPDDR5-6400MHz
- M.2 NVMe
- 2 x 2.5GbE RJ45 Ports (Intel i226-V)
- Ubuntu 24.04.3 LTS
- Custom PCBs
- RP2350 Microcontroller
- Dual CAN Controllers
- CAN Daisychain Passthrough
- PWM Output
- Extensible mainboard via GPIO
- LattePanda Sigma
- Propulsion
- 8x Blue Robotics T200
- Navigation
- WaterLinked DVL-A50 Standard
- VectorNav VN-100 IMU
- Blue Robotics Bar High-Resolution Depth/Pressure Sensor
- Vision
- 3x Point Grey FL3-GE-14S3C-C
- 2x Logitech 1080p USB Webcam
- Control
- Thrust Allocation, Drag Adjustment, and Station Keeping
- Box-Constrained Least-Squares Solver, using QP Optimization
- Velocity and Position PID in all Axes
- Mass and Buoyancy Control creates Artificial Neutral Buoyancy
- Power
- 5S2P LiPo Battery, 18.5v (nominal)
- Thrusters run at 5S Voltage
- Converted to 12v and 3.3v for Compute and Sensor Subsystems
- Software
- ROS2 Jazzy
- Gazebo Harmonic Simulator
- GNCea Custom Thrust Plugin
- Nix Flake for Declarative Dev Environment
- GitHub Actions Automated Build & Test
Pool Logs
We keep logs of the goals and outcomes of our pool tests, in order to remain focused on our goals for Guppy's development. Check them out here!