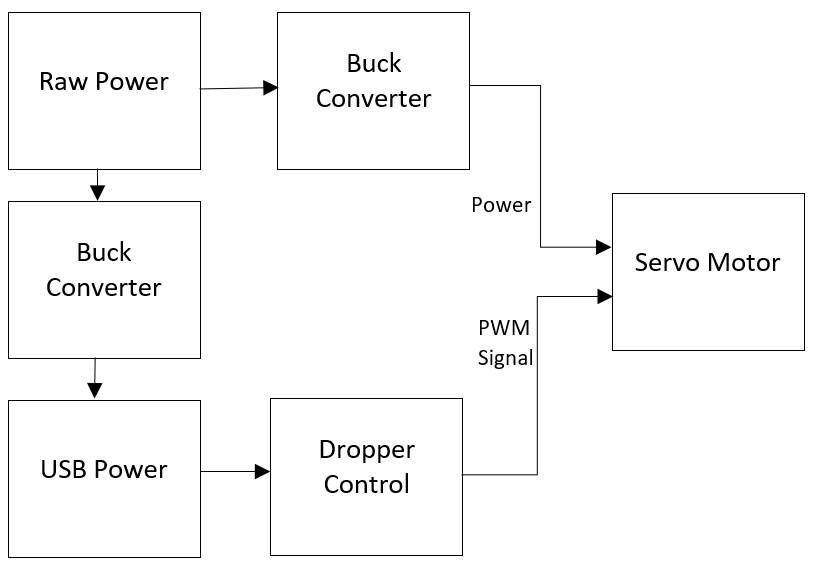
Dropper Control
The dropper utilizes a servo motor and a DC-DC buck converter. Since the servo motor requires a larger current to operate correctly, a DC-DC buck converter was used to provide more current to the motor. The power line and ground were hooked up to the buck converter, and the dropper controller was connected to the signal line. The dropper controller utilizes an ATMEGA 1284P microcontroller. The microcontroller is powered over USB and operates at 3.3 volts. The signal line for the servo motor is hooked up to a PWM capable pin on the microcontroller. The code for the microcontroller utilizes the built-in PWM hardware for simplicity in the firmware. The firmware holds the servo in a certain position and regularly checks the UART for the value that tells the firmware to drop the payload in the dropper.